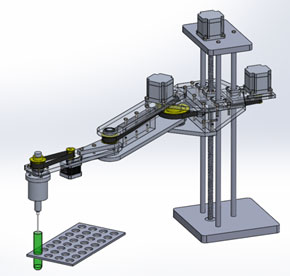
4 Degrees of Freedom Robotic Arm Detection and Sampling Equipment
Case description:
Use the motor and screw to control the motion position in the vertical direction.
Horizontal direction Use motor control pulley and belt to achieve horizontal motion control.
The overall control of 4 degrees of freedom is realized, and the sampling is completed by the robotic arm.
Suitable for mobile operation, medical research and other fields.
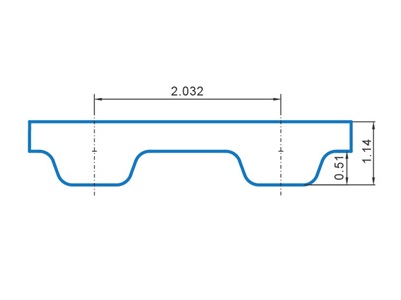
Part description:
Motor shaft output generally uses small tooth type MXL small belt wheel, such as BLA16MXL025-A;
The driving wheel uses a small tooth type MXL large belt wheel, such as BLA32MXL025-B;
The synchronous belt generally uses a ring rubber belt, in the case of ① belt circumference about 300mm, ②③ belt circumference about 550mm;
Small belt wheel, short belt suitable for general torque light load transmission mechanism.
Belt wheel, belt for important parts - yellow
Workpieces -- blue
Frame -- grey